
ラズパイ&ブレッドボードで遊ぶ(4)~ヘッドライト・テールライト同時点灯の阻止

マスコン風のパワーパックを作りたい、ということを最終目標にして、まずは Raspberry Pi Pico でどんなことができるのか、と、ブレッドボードを使っていろいろと遊んでいます。
前回は、ちょっと横道にそれて、車速計測という話を書きました。

今回は、本筋です。でも、まだ完成ではありません。
早い目に、気になる問題をつぶしておこう、というのがテーマです。
モーターからの逆電流?

この中で、12VのPWM制御をしたレールの上にモーター車が乗ると、M車自身も客車も、ヘッドライト・テールライトが先頭・最後尾ともに点灯する、という異常事態が発生する話を書きました。
トップに挙げた写真がその状態です。
室内灯のように、意図して左右どちらのレールが+/-でも点灯するような機構もありますが、ヘッドライトやテールライトは、通常、進行方向に向かって右側のレールが+のとき、車両は前進し、前方のヘッドライトが点灯、後方のヘッドライトは消灯します。
つまりは、車両が前進しているのに末尾のヘッドライトが点灯するのは、どう考えても異常事態です。
オシロスコープなどの計測機器が手元にないので何とも言えないのですが、M車が無ければ(客車だけなら)正常ですので、モータードライバーは、正常に動作していると思います。
調べていく中で、ネット上で見かけたのが「モーターによるノイズでヘッドライトとテールライトが同時に点灯する」という記事です。
対策として、モーター(線路)への出力部分にダイオードを挟むことで解決されていたようですので、同じようにやってみます。
元の姿がこちら。
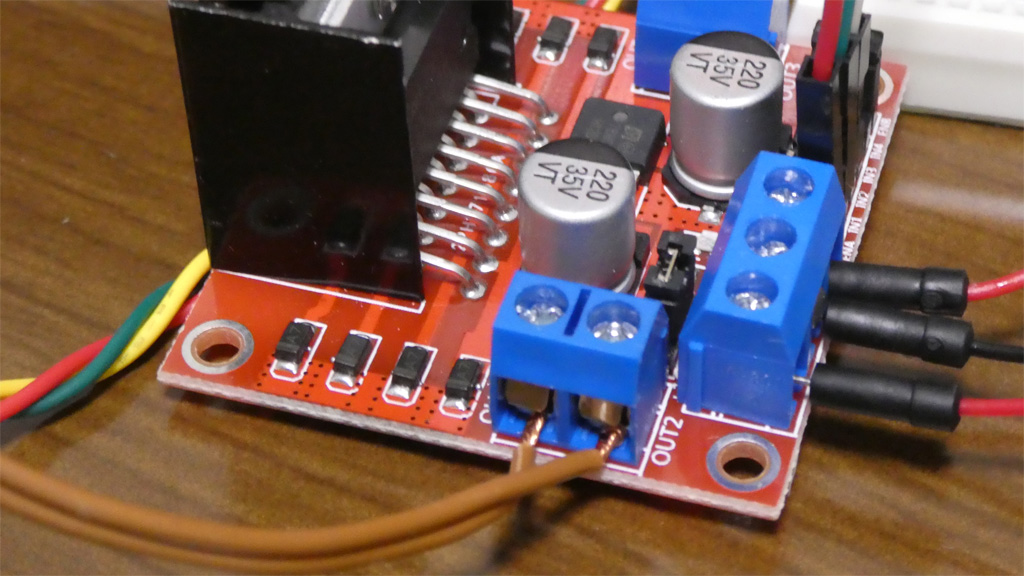
OUT1/OUT2に、直接D.C.フィーダーのコードを取り付けています。
これに、ブリッジダイオードを挟んでみました。
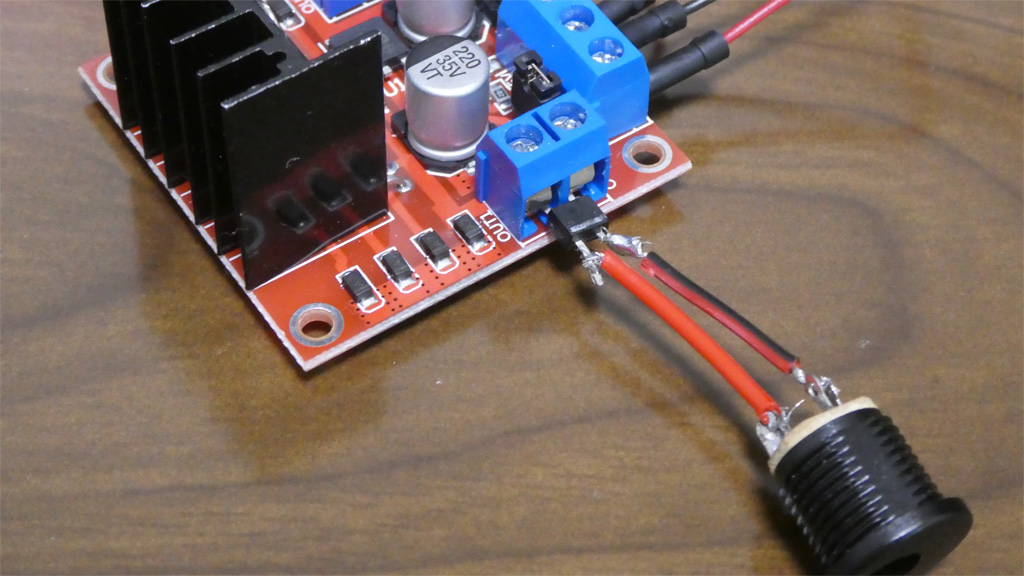
ちょっと、いや、かなり無理やりです。
このブリッジダイオードはもともと、室内灯をLEDテープで自作するときに購入していたものを使用しています。
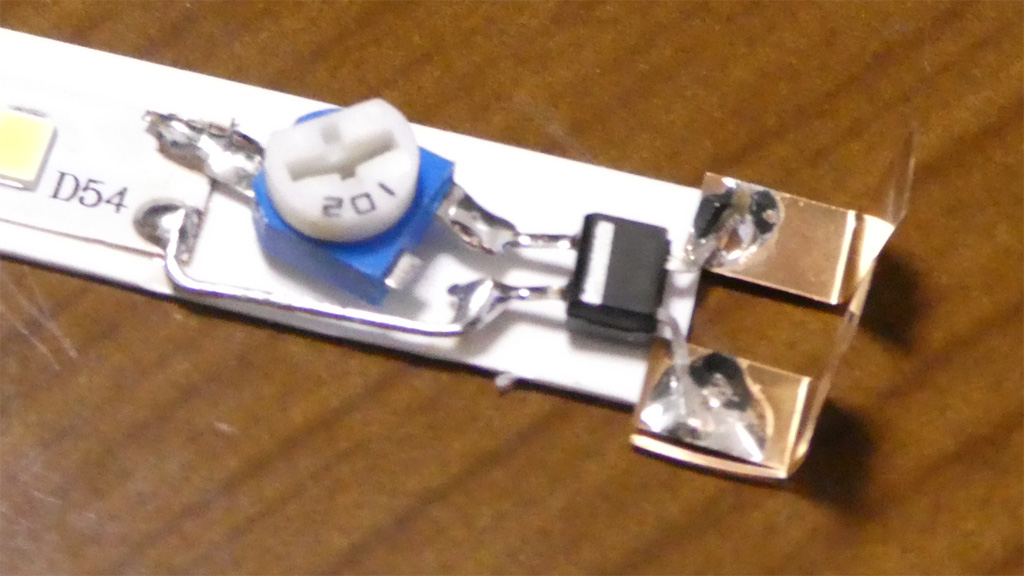
右側の銅板は車輪を通してレールからの電気を受けるのですが、進行方向に応じて+にも-にもなります。一方、LEDの方は写真上側が+でなければ点灯しませんから、入力側が+/-のいずれでも、ダイオードの写真上側の端子が+、下側が-になるように、整流してくれます。
今回の問題では、PWMの周波内で+と-が入れ替わっているはずですので、いわば交流のような状態ですからダイオードによる整流が有効と考えられます。
ちなみに、本題とは逸れますが室内灯に可変抵抗を使用した理由は、これ。

記事中には特に明記してなかったんですが(書いていたつもりでした…)、5両の客車のそれぞれの抵抗値を変えて、明るさの違いを見るためでした。右側の車両ほど室内灯が暗くなっているのは、抵抗値を大きくしているためです。
本題に戻ります。
端子に直接ダイオードを突っ込むなど、無茶すぎる気はしますが、あくまでも検証用。ダイオードの脚は貧弱ですからちょっと力を入れると簡単に曲がります。しかも、数回曲げると切断されます。なので、繰り返しますが、検証用です。。
なぜ、直接D.C.フィーダーのケーブルではなくソケットを使用したのか、については大きな理由はなく、同じく先述の記事に書いた、自作パワーパック用のフィーダー付きコードを共通で使用するためだけのことです。
改善効果と問題点
ブリッジダイオードは室内灯を自作した時に使用していますので、効果は確認済み。ですので当然のように逆電流は解消されました。

なので、あえて改善が判る動画を撮ってなかったんですね。
写真は、走行中のEF64。進行方向後ろ側のヘッドライトが点いていないことがわかります。
というわけで、最も手っ取り早い改修方法とはなったんですが、これによる大きな代償もあります。それが、ソフト制御による前後方向切換えが出来なくなった、ということです。
ここにも書いた通り、モータードライブコントローラーのIN1/IN2に、H/Lを与えると正転、L/Hを与えると逆転となるのですが、逆転の設定をしてもブリッジダイオードにより、正転と同じことになります。
ですので、

ここに書いたように、出力方向は物理的にトグルスイッチで切り替えるようにする必要があります。
今使用している自作パワーパックでも不自由を感じていないため、最終的には物理的な切替えを行うようスイッチを設けたいと思います。
機関車のように進行方向前面にはヘッドライトしか点灯しない、あるいは客車のように最後尾に灯るのはテールライトだけならば目をつぶることができたかもしれませんが、キハ181のようにヘッドライトとテールライトが同時に点灯した状態で前進してくるのは見たくありませんから、ダイオードによる逆電流阻止+逆転スイッチの導入が正しい姿なのかと思います。
KATOの機関車も…
これまで、自作パワーパックを作成して以来、1年半以上にわたってそれを使用してきましたが、KATOの機関車の多くはテールライト/トレインマークが点灯するだけの電圧(正しくはPWMデューティー比でしょうか)でもヘッドライトが点灯しない、という状況を見てきました。


それが、このモータードライバーを使用すると、この通り。

停止しているEF65のヘッドライトが点灯しています。
ただ、心なしか停止時のモーターの発する唸り声がTOMIX製の機関車よりも大きい気がします。なので、モーターに負担をかけているのかな、という心配はありますけどね。
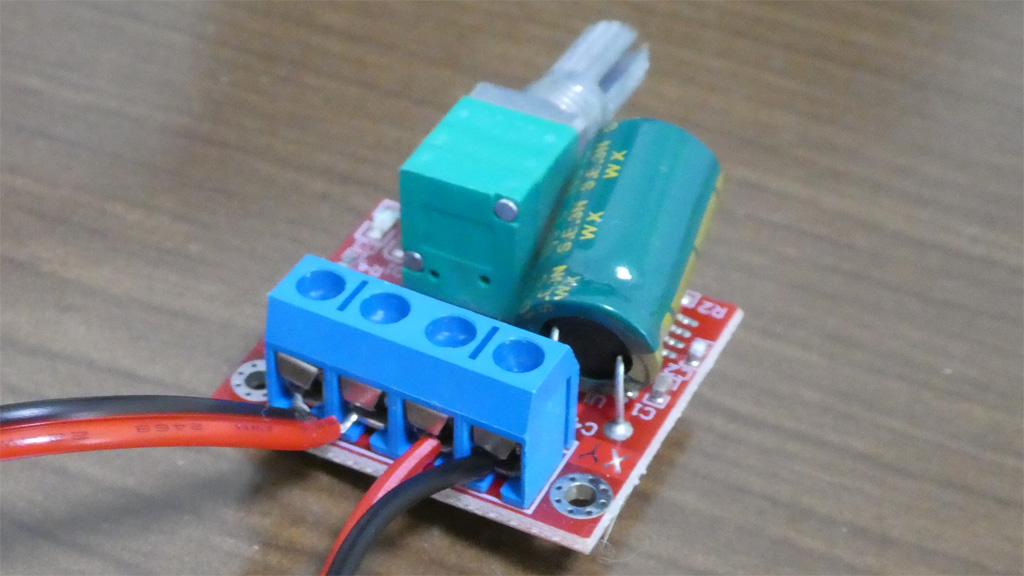
で、同じPWM制御なのに、ヘッドライトが点く/点かないの違いはどこにあるのかと考えたんですが、自作パワーパックに使用したPWMコントローラーは、PWM周波数が公称20kHz。
一方、今回 Raspberry Pi Pico で制御しているモータードライバーには、1000Hzを設定しています。
その違いがKATOの機関車に搭載されているLEDにどのように影響するのかはよく分かりませんが、このあたりも今後確認しておきたいところですね。(停止時に点灯するための周波数の設定値、とか)
ここ数日の確認で分かってきたのは、同じ周波数ならデューティー比を上げるとモーターが動き出す(←これは当然)というのと、同じデューティー比なら周波数が低い方がモーターが動き出しやすいということ。
低い周波数では車両が動き出すデューティー比でも、周波数を高めると車両が止まる(動き出さない)ということです。
LEDもそうですが、パワーパックの本命と言えるこのモーターの特性も調べていかないと使いやすいパワーパックにはならないですからね。まだまだ先は長そうです。
ちなみに、PWM周波数を変えると、モーターの唸り声の高さも変わります。段階的に変えると、ドレミファインバーターのような状態になります。
歌う機関車とか、作れるかも。って、完全に本筋から逸れてますね。。